10月29日,电子电气工程学院近日迎来了一场引人关注的学术报告,由张博士主讲,报告主题为“Dynamically Triggered Estimator-Based Controller and Its Application on An Omnidirectional Robot”。
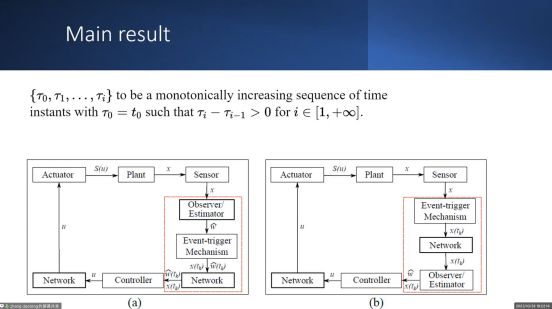
在报告中,张道统博士详细介绍了动态触发的估计器控制器及其在全向机器人上的应用。他深入阐述了这一控制方法的原理和特点,并结合实例生动展示了在全向机器人上应用该控制器的成果。张博士的报告涉及了先进的控制技术,为同学们呈现了一个兼具理论深度和实际应用的学术盛宴。
学术报告结束后,张博士与同学们进行了深入交流。同学们积极提问,就报告中的技术难点、实验设计等问题与张博士进行了互动。张博士不仅耐心解答了同学们的疑问,还分享了他在这一领域的研究心得和经验,为同学们的学术研究提供了有益的指导。
这场学术报告不仅为同学们提供了一个深度学习的机会,也为学院师生展示了该领域前沿技术的研究成果。张博士的研究内容引发了同学们对先进控制技术的浓厚兴趣,为学院学术氛围的提升和同学们学术素养的培养做出了积极贡献。
通过这次学术交流,学院进一步促进了与张博士的学术合作关系,为学院在该领域的研究与发展注入了新的动力。这样的学术活动也为同学们提供了更广泛的学术视野和实践机会,有助于推动学院在科研领域的不断创新。

